
|
||
| In March 2005 Robo Games were held at the San Francisco State University. One of the contests was RoboMagellan, in which a robot had to navigate autonomously from a starting point to a destination point. Hanno and I decided just a week prior to the event to participate. |
|
|
|
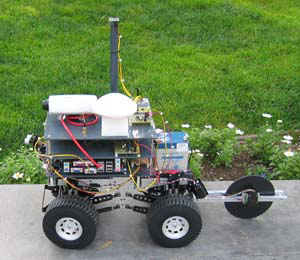
| We built our Robby from scratch, using a
wooden chassis, wheels from a golfcart, and motors from handheld drills. We had high
tech navigation by GPS (global positioning system), and vision guidance by a camera and
image processing software running in a notebook. We tested the vision system by
walking through the neighborhood. |
||
 |
The Rules of the Game RoboMagellan is a robotics competition emphasizing autonomous navigation and obstacle avoidance over varied, outdoor terrain. Robots have three opportunities to navigate from a starting point to an ending point and are scored on time required to complete the course with opportunities to lower the score based on contacting intermediate points. The Course The race took place in the Quad of the SFSU Campus. The path was from A to B with 2 way points. |
Some Participants
|
 Rusty |
||
 A2 |
 GPSbot |
|
|
|
The Starting Point |
First Waypoint - (the red cone in the back) |
|
|
|
|
Second Waypoint |
Destination |
 |
The destination was located at the top of a flight of stairs, which you could circumnavigate by going up a sloping lawn on either side. 11 contestants registered, |




