| Ingolf's Parallel Career |
 |
 |
 |
||
|
|
 |
|

 |
 |
 |
||
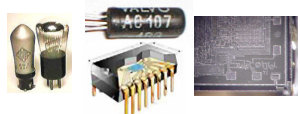
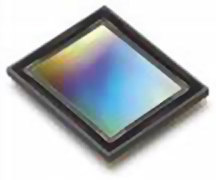
| After reading Eduard Rheins book "Wunder der Wellen" (Miracle of waves) about the fascinating story of early television devices I built a Nipkow disk - a spinning disk with 32 holes in a spiral track, a vacuum photo cell, amplifier, and a Neon light as a modulated light source. I was able to transmit crude pictures with 32 lines resolution. During my apprenticeship - mandatory for studying Physics - at the NDR ( Radio/Tv Station in Hamburg) I had a closer look at an iconoscope. For my PhD thesis I used a super orthicon for image capture and electronic circuits for image processing. Later at Optitec I used a CCD imager with a very high frame rate. Nowadays CCDs or CMOS imagers are widespread in digital cameras, webcams, and cell phones. | ||||
|
|
 |
 |
|||
| My first fully functional computer IR3 - a homebrew version of a Digital Equipment PDP8 computer - was running in 1972, may be one of the first personal computers in Germany. (The Apple Computer was introduced 1976 at the Homebrew Computer Club in Silicon Valley). After building the hardware I became fascinated with Artificial Intelligence, Expert Systems, Problem Solver, and Neural Networks. | |||||

| The ultimate computer is the human brain. |
 |
 |
|
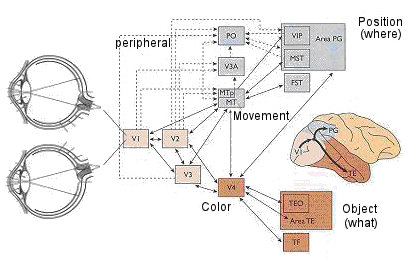
| My main interest is the human brain. I am trying to understand the neural system in the cortex, cerebellum, limbic system. My special interest is the vision system with the "where" and "what" pathways. Currently I am writing a book to be published at the end of 2007. I want to learn from Mother Nature and apply the knowledge to the field of robotics. | ||
Autonomous robots have to understand the environment - they have to know "where" is "what". Vision is computational very intensive. Early academic research was hampered by slow computers. The famous Stanford cart (1965) looked at a scene, calculated for 20 minutes, then moved a step.
|
||||||||
 |
 |
 |
||||||
2005: I presented "3D Vision and Vision Guided Grasp" 2005 my son and I participated in Robo Games2005 at the San Francisco University 2006: My team presented "Object Recognition using Lowe's SIFT algorithm" 2007: Presentation of "FPGA Vision and FPGA Controller Project" Slideshow 2007:Robo Games 2007 in San Francisco at Fort Mason 2008: Yuri's Night Moffett Field Mountain View |
||||||||

|
|
 |
 |
||||
|
"Help hobbyist build balancing robots" |
||||||
2006 I started Roboticore together with 3 Silicon Valley Engineers "Building Core technologies for the Robotic Revolution".
Our first product will be Visibot, an autonomous robot with vision capabilities.

